About me
Lei Yang is a fourth year Ph.D. student at School of Vehicle and Mobility, Tsinghua University, supervised by Prof. Jun Li. He received his M.S. degree from Beihang University in 2018, supervised by Prof. Qiang Zhan. He has worked at DAMO Academy, Alibaba Group as a research intern supervised by Prof. Kaicheng Yu and Prof. Kun Yuan from 2022.05 to 2023.06. Before the PhD career, he has also joined Autonomous Driving Laboratory, JD.COM as a full-time algorithm engineer supervised by Dr. Xinyu Xu from 2018.06 to 2020.07.
My research spans the tasks of 3D object detection, 3D multi-object tracking, occupancy prediction and semi-supervised learning, all aimed at achieving accurate and robust perception for Level 5 autonomous driving.
Fields: Computer Vision, Autonomous Driving, Vehicle-Infrastructure Cooperation
Topics: Vision-centric Perception, 3D Object Detection, Multi-modal Fusion, Semi-supervised Learning
News
- 2023.09: One paper is accepted by TITS 2023!
- 2023.08: One paper is accepted by TCSVT 2023!
- 2023.07: One paper is accepted by ICCV 2023!
- 2023.06: One paper is accepted by TITS 2023!
- 2023.04: One paper is accepted by TCSVT 2023!
- 2023.03: One paper is accepted by CVPR 2023!
- 2023.03: One paper is accepted by KBS 2023!
Publications
CVPR 2023
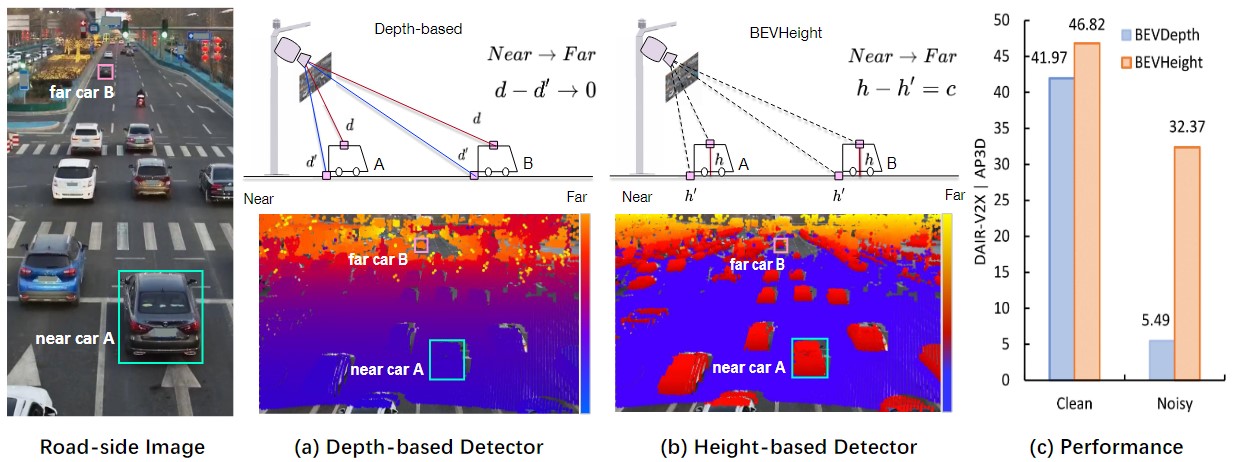
BEVHeight: A Robust Framework for Vision-based Roadside 3D Object Detection
Lei Yang, Kaicheng Yu, Tao Tang, Jun Li, Kun Yuan, Li Wang, Xinyu Zhang, Peng Chen.
IEEE Conference on Computer Vision and Pattern Recognition (CVPR), 2023
[Paper] [Code] [Blog] [BibTex]
TCSVT 2023
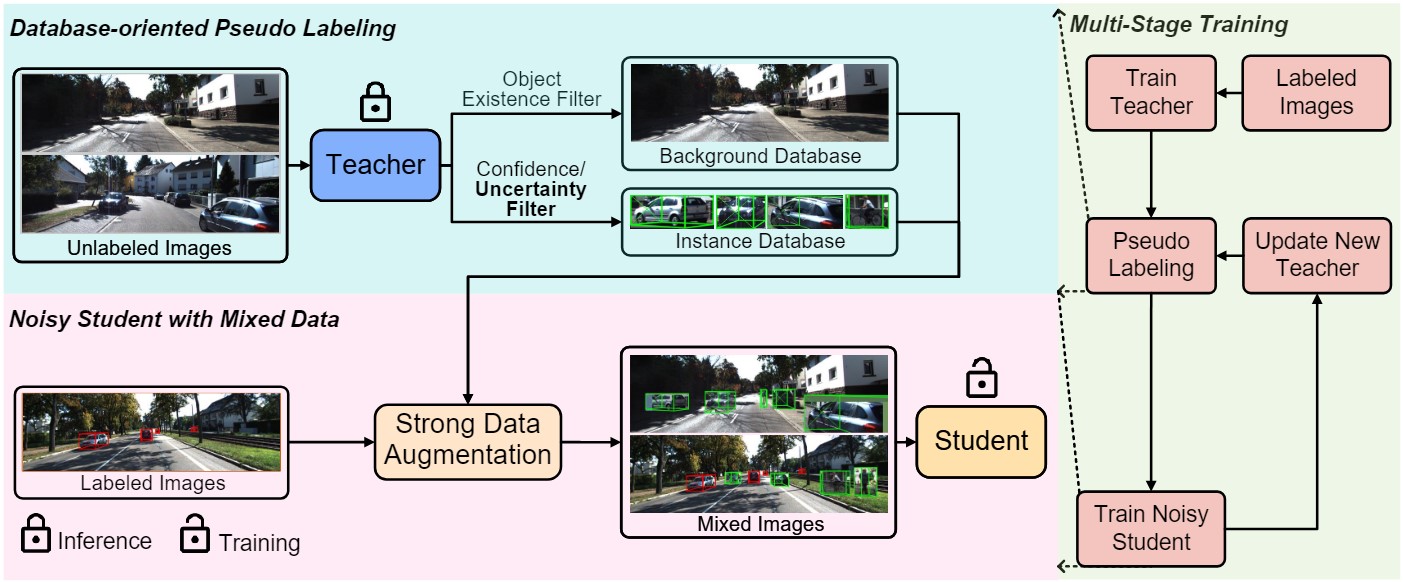
Mix-Teaching: A simple, unified and effective semi-supervised learning framework for monocular 3d object detection
Lei Yang, Xinyu Zhang, Jun Li, Li Wang, Minghan Zhu, Chuang Zhang, Huaping Liu.
IEEE Transactions on Circuits and Systems for Video Technology (TCSVT), 2023
[Paper] [Code] [Blog] [BibTex]
KBS 2023
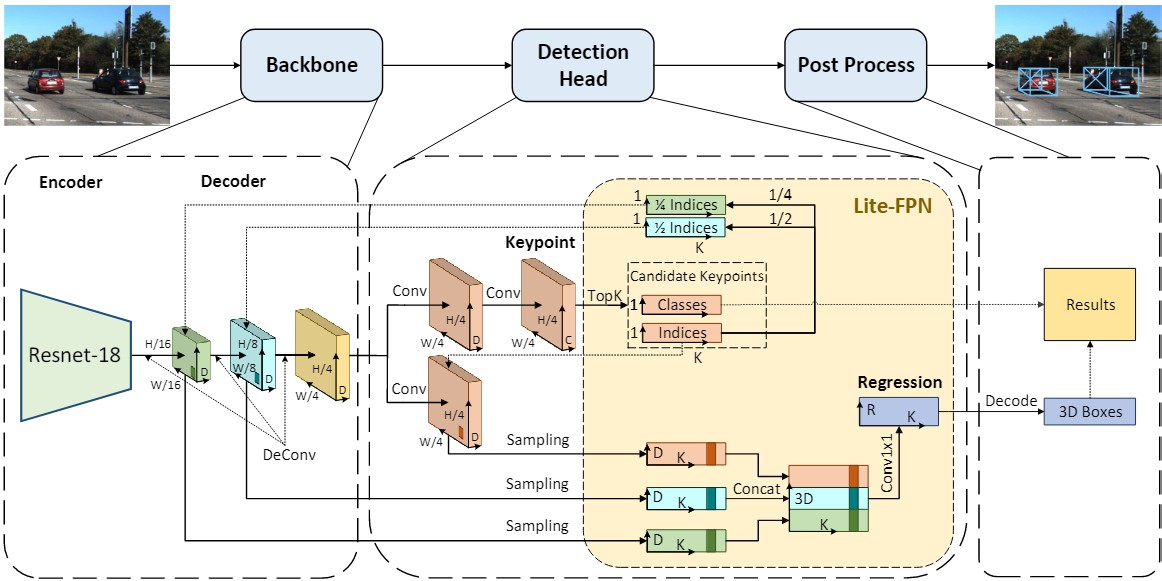
Lite-FPN for keypoint-based monocular 3d object detection
Lei Yang, Xinyu Zhang, Jun Li, Li Wang, Minghan Zhu, Lei Zhu.
Knowledge-Based Systems (KBS), 2023
[Paper] [Code] [Blog] [BibTex]
arXiv preprint
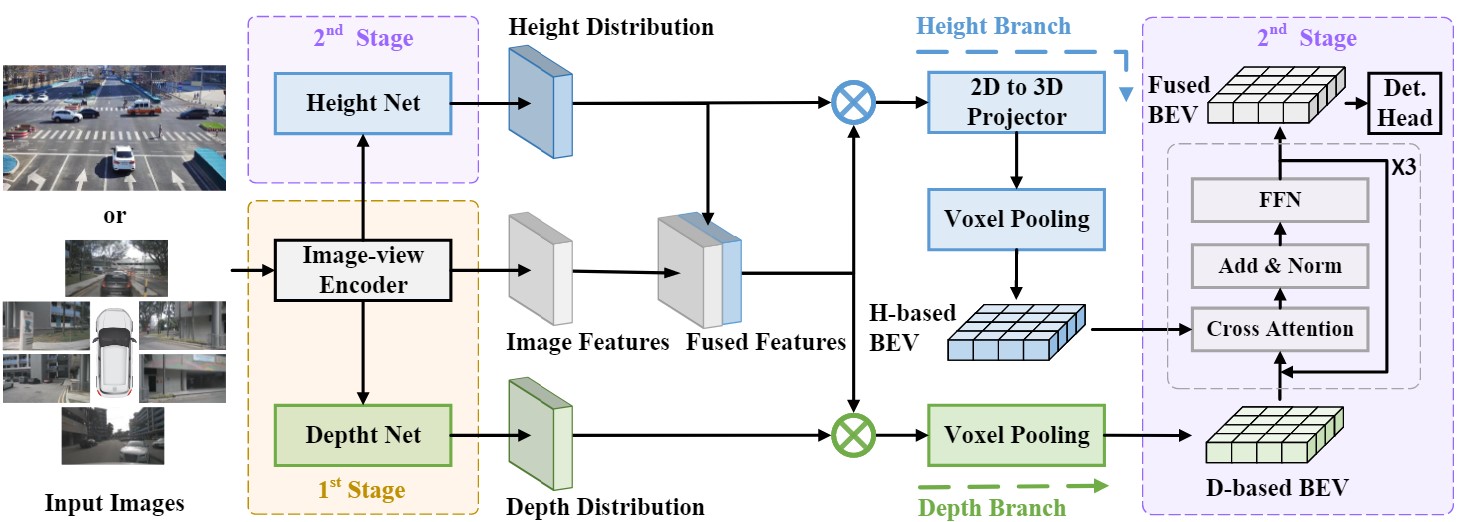
BEVHeight++: Toward Robust Visual Centric 3D Object Detection
Lei Yang, Tao Tang, Jun Li, Peng Chen, Kun Yuan, Li Wang, Xinyu Zhang, Kaicheng Yu.
arXiv preprint, 2023
[Paper] [Blog] [BibTex]
arXiv preprint
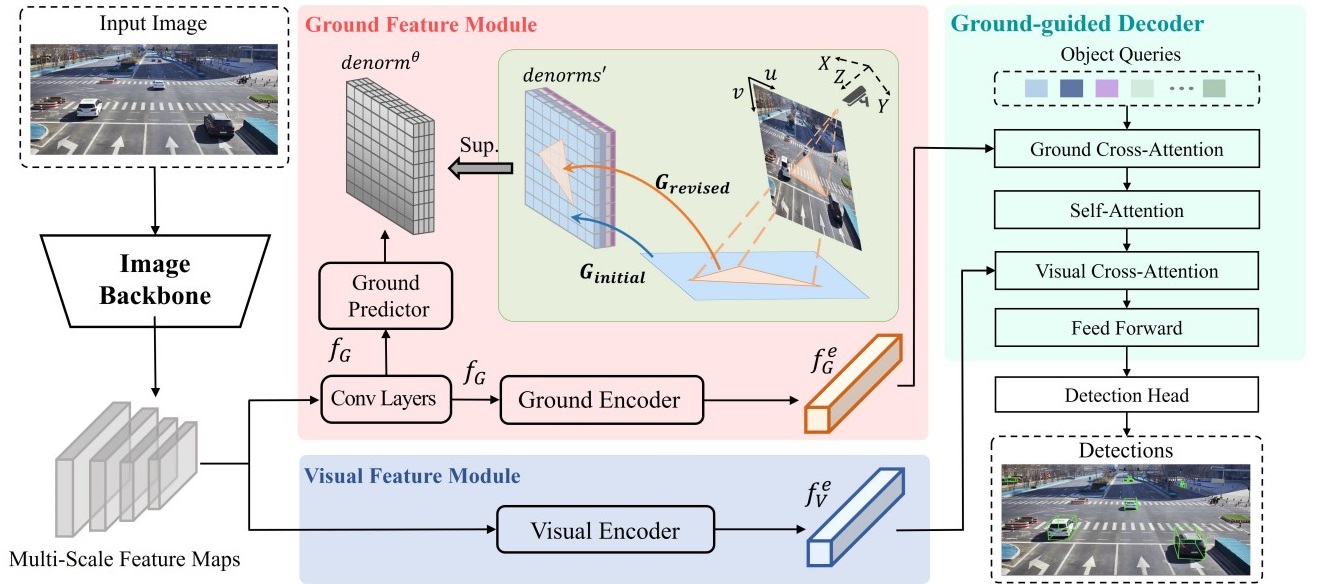
MonoGAE: Roadside Monocular 3D Object Detection with Ground-Aware Embeddings
Lei Yang, Jiaxin Yu, Xinyu Zhang, Jun Li, Li Wang, Yi Huang, Chuang Zhang, Yiming Li.
arXiv preprint, 2023
[Paper] [BibTex]
ICCV 2023
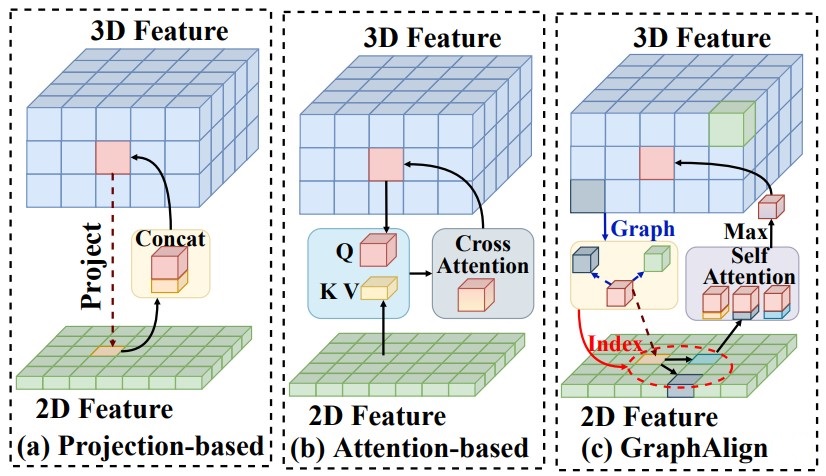
GraphAlign: Enhancing Accurate Feature Alignment by Graph matching for Multi-Modal 3D Object Detection
Ziying Song, Haiyue Wei, Lin Bai, Lei Yang, Caiyan Jia.
International Conference on Computer Vision (ICCV), 2023
[Paper] [BibTex]
TCSVT 2023
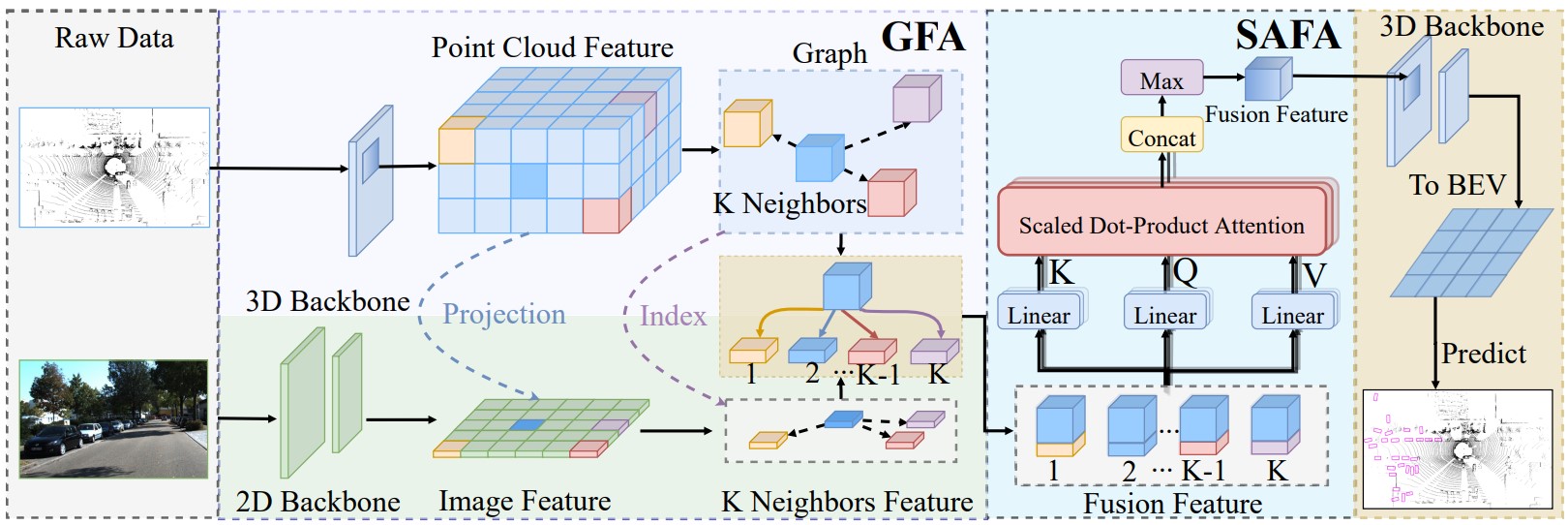
GraphAlign++: An Accurate Feature Alignment by Graph Matching for Multi-Modal 3D Object Detection
Ziying Song, Caiyan Jia, Lei Yang, Haiyue Wei, Lin Liu.
IEEE Transactions on Circuits and Systems for Video Technology (TCSVT), 2023
[Paper] [BibTex]
TITS 2023
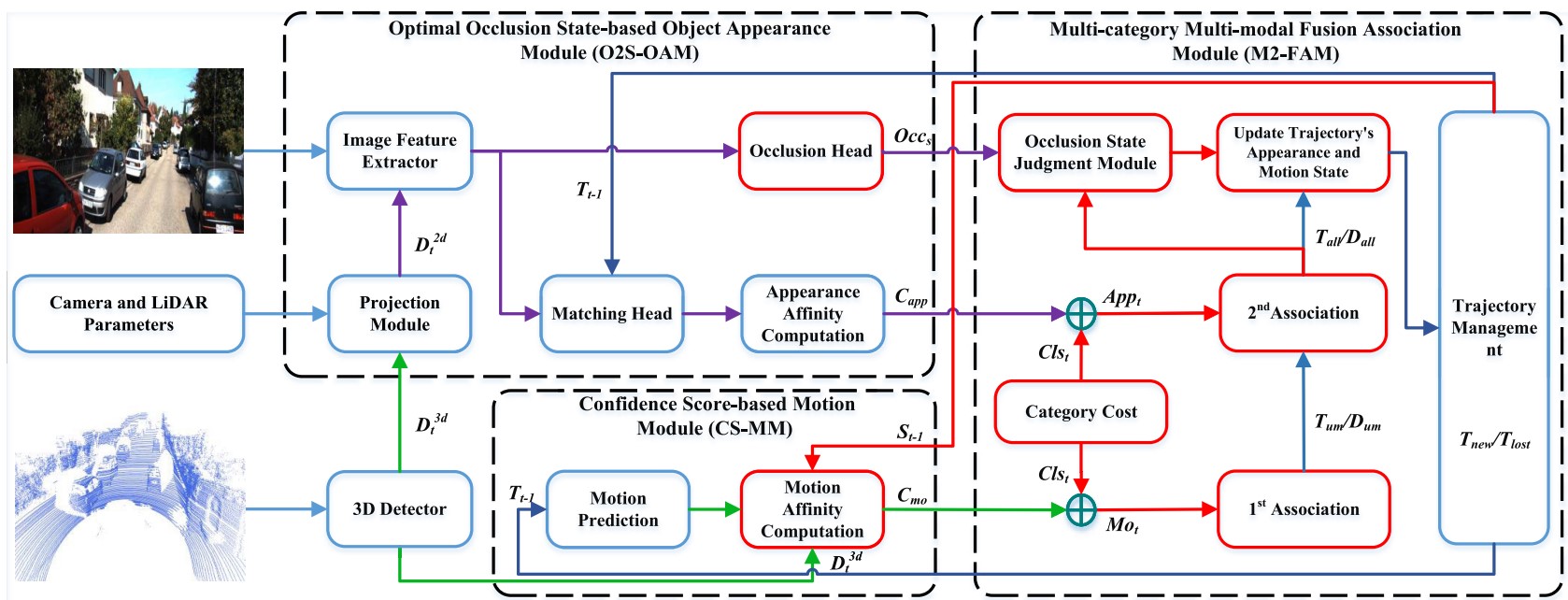
CAMO-MOT: Combined Appearance-Motion Optimization for 3D Multi-Object Tracking with Camera-LiDAR Fusion
Li Wang, Xinyu Zhang, Wenyuan Qin, Xiaoyu Li, Lei Yang, Zhiwei Li, Lei Zhu, Hong Wang, Jun Li, Huaping Liu.
IEEE Transactions on Intelligent Transportation Systems (TITS), 2023
[Paper] [Code] [Blog] [BibTex]
TITS 2023
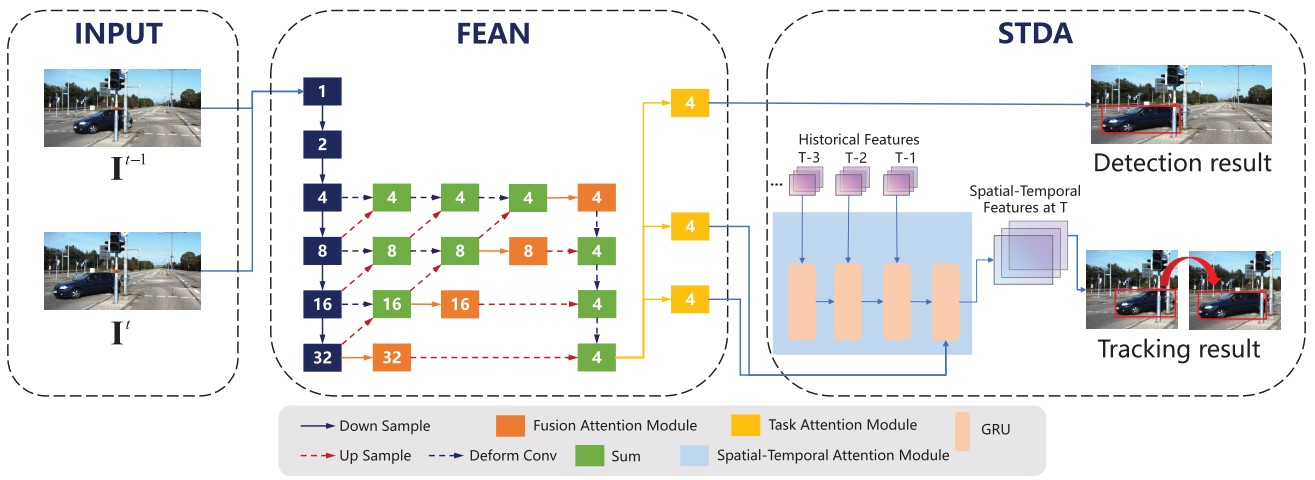
AttentionTrack: Multiple Object Tracking in Traffic Scenarios Using Features Attention
Chuang Zhang, Sifa Zheng, Haoran Wu, Ziqing Gu, Wenchao Sun, Lei Yang.
IEEE Transactions on Intelligent Transportation Systems (TITS), 2023
[Paper] [BibTex]
TIV 2023

Multi-Modal 3D Object Detection in Autonomous Driving: A Survey and Taxonomy
Li Wang, Xinyu Zhang, Ziying Song, Jiangfeng Bi, Guoxin Zhang, Haiyue Wei, Liyao Tang, Lei Yang, Jun Li, Caiyan Jia, Lijun Zhao.
IEEE Transactions on Intelligent Vehicles (TIV), 2023.
[Paper] [Blog] [BibTex]
TIV 2022
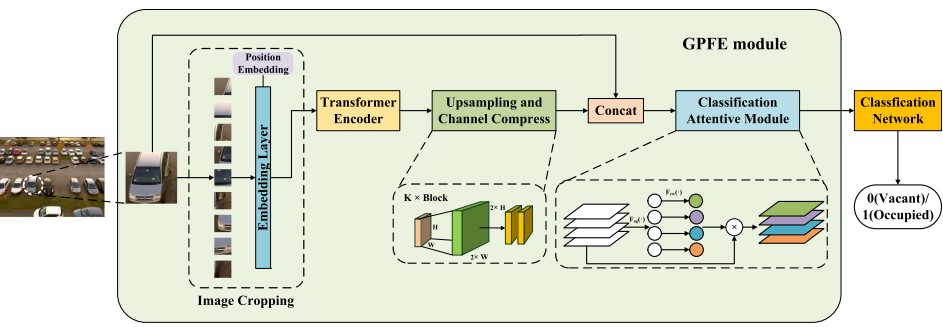
Global perception-based robust parking space detection using a low-cost camera
Li Wang, Xinyu Zhang, Weijia Zeng, Wei Liu, Lei Yang, Jun Li, Huaping Liu.
IEEE Transactions on Intelligent Vehicles (TIV), 2022.
[Paper] [BibTex]
TIV 2022
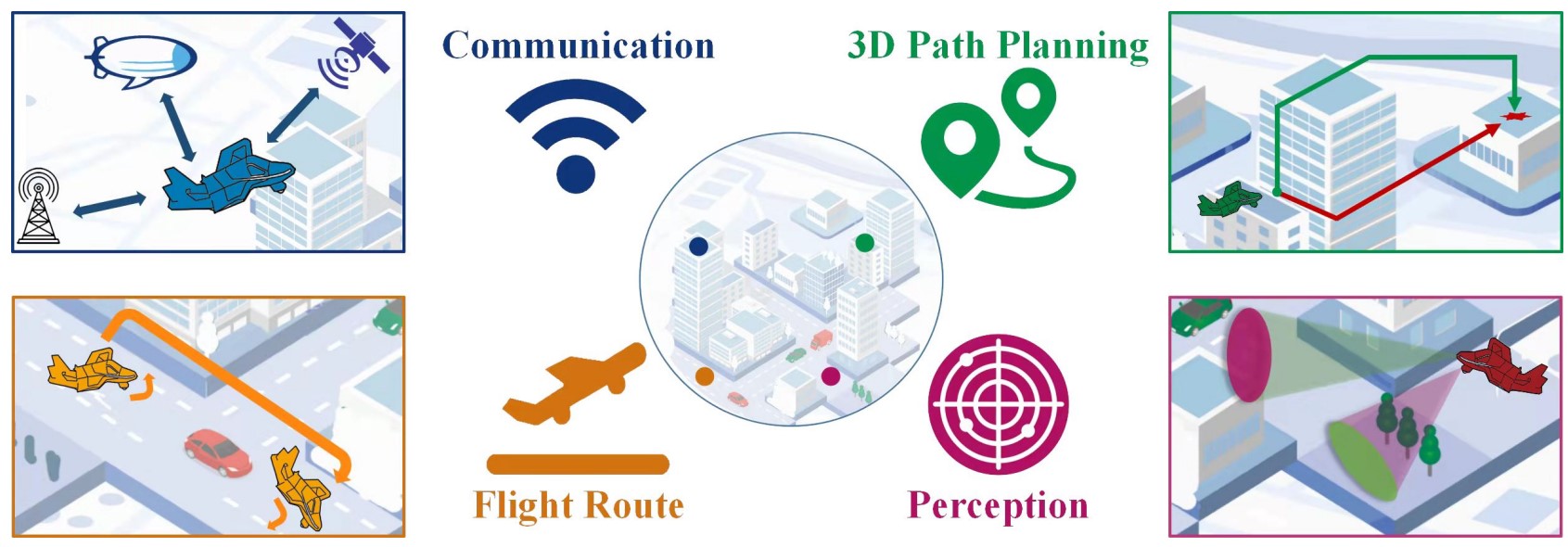
Intelligent amphibious ground-aerial vehicles: State of the art technology for future transportation
Xinyu Zhang, Jiangeng Huang, Yuanhao Huang, Kangyao Huang, Lei Yang, Yan Han, Li Wang, Huaping Liu, Jianxi Luo, Jun Li.
IEEE Transactions on Intelligent Vehicles (TIV), 2022.
[Paper] [BibTex]
TVT 2022
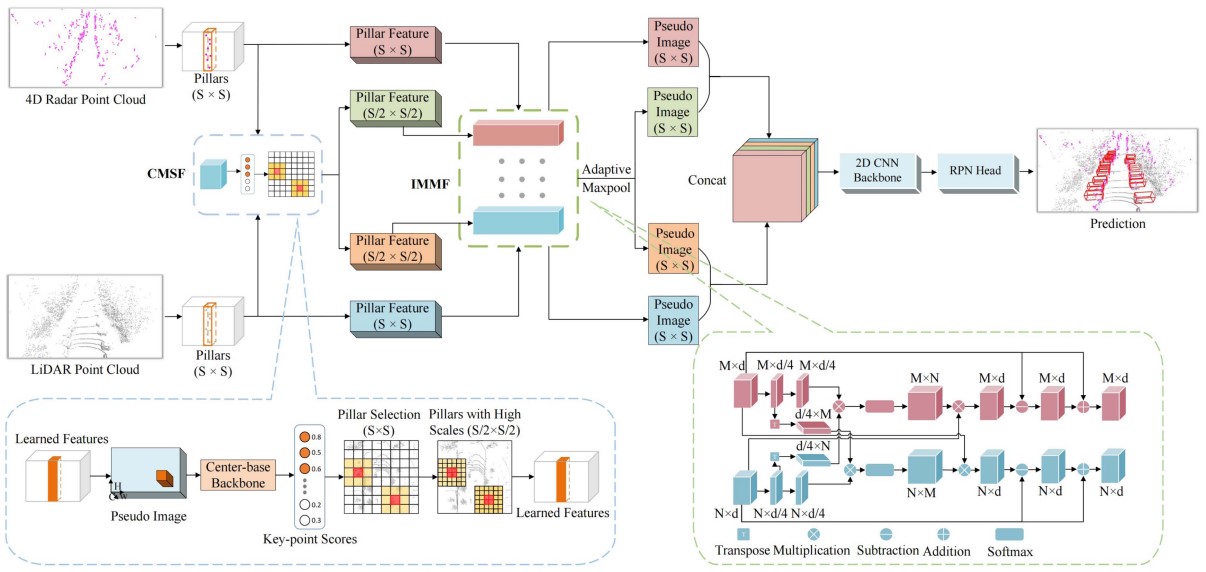
Multi-Modal and Multi-Scale Fusion 3D Object Detection of 4D Radar and LiDAR for Autonomous Driving
Li Wang, Xinyu Zhang, Jun Li, Baowei Xv, Rong Fu, Haifeng Chen, Lei Yang, Dafeng Jin, Lijun Zhao.
IEEE Transactions on Vehicular Technology (TVT), 2022.
[Paper] [BibTex]
Datasets
arXiv preprint
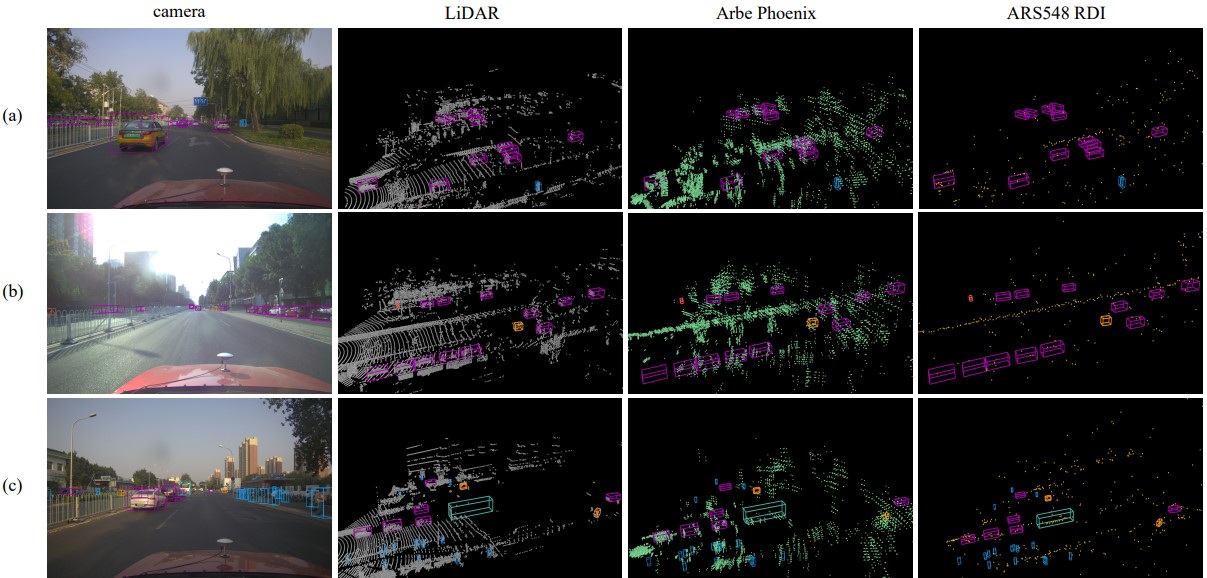
Dual Radar: A Multi-modal Dataset with Dual 4D Radar for Autononous Driving
Dual-Radar is a brand new dataset based on 4D radar that can be used for studies on deep learning object detection and tracking in the field of autonomous driving. The system of ego vehicle includes a high-resolution camera, a 80-line LiDAR and two up-to-date and different models of 4D radars operating in different modes(Arbe and ARS548).
arXiv preprint, 2023
[Paper] [Preject & Code] [Blog] [BibTex]
arXiv preprint
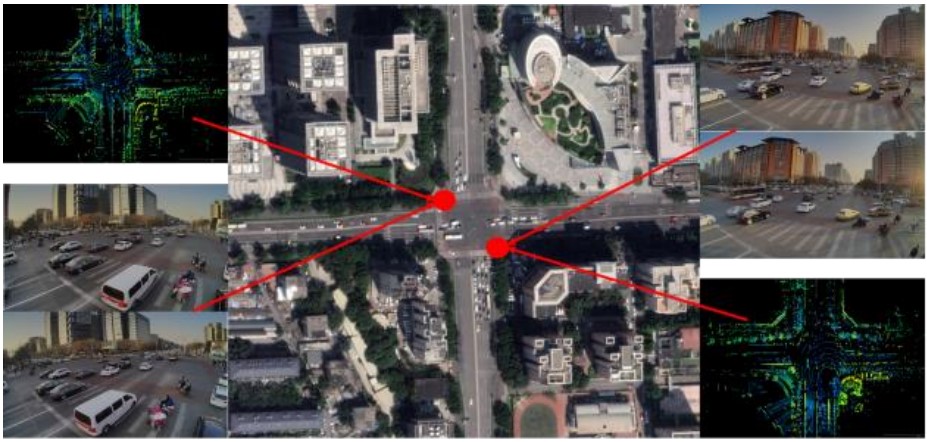
IPS300+: a Challenging Multimodal Dataset for Intersection Perception System
IPS300+ is the first multimodal dataset available for roadside perception tasks in large-scale urban intersection scene, which is the most challenging dataset with the highest label density.
arXiv preprint, 2021
[Paper] [Preject & Code] [BibTex]
Service
- Reviewer of IEEE T-CSVT, CVPR, ICRA
